


Phi9 — physical AI lab
Physical AI research, data systems, and deployable intelligence.
Phi9 turns real-world behavior into reusable training signal, evaluation systems, and deployable physical intelligence.
From capture to evaluation, the physical AI loop.
One loop. Four stages. The work is turning real-world behavior into signal, training against it, and measuring what survives contact with reality.
First signal
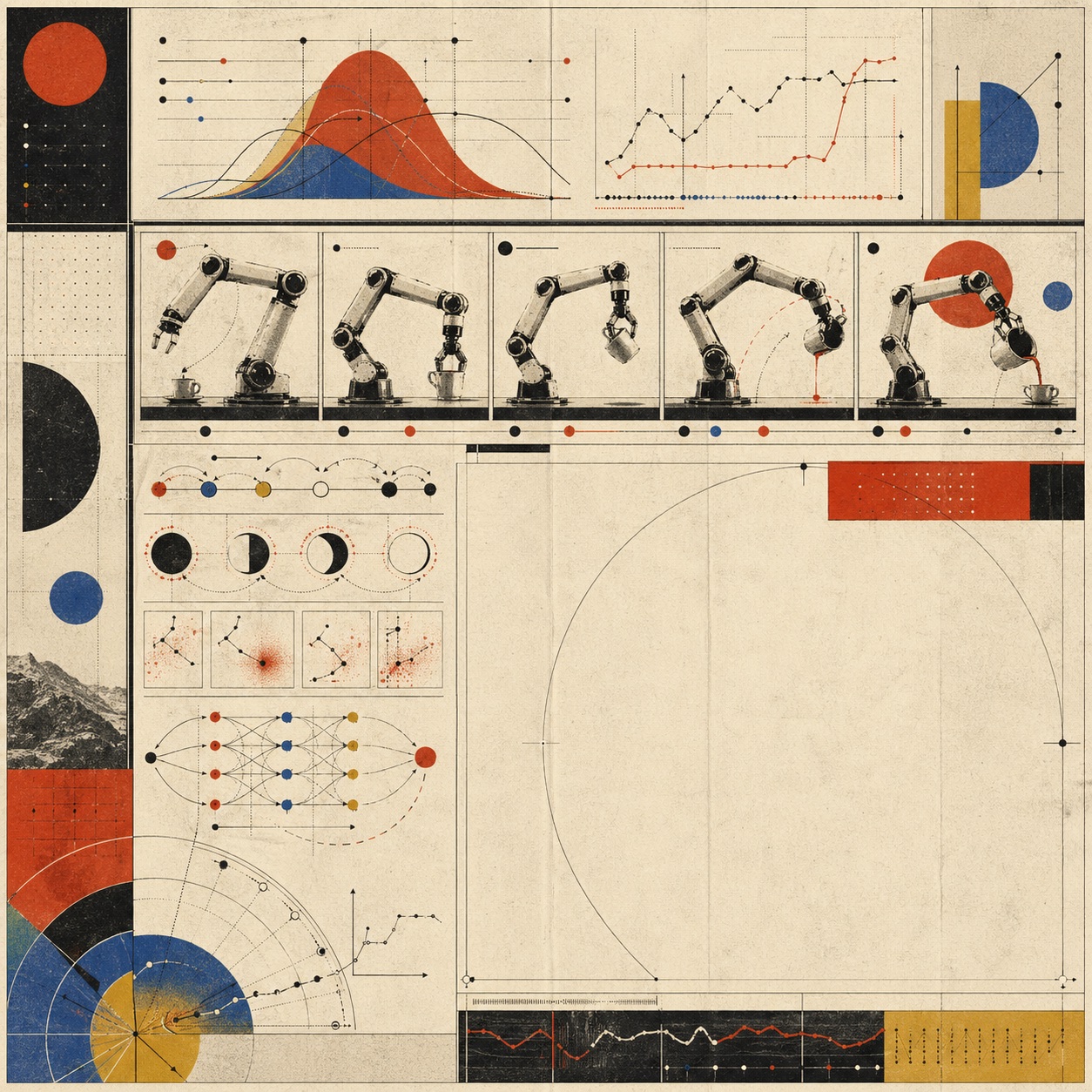
Capture
The loop starts with wearable capture: full-body motion, egocentric video, IMU traces, task metadata, and live sync. The goal is not a studio recording; it is a reusable demonstration with timing, intent, and physical context still attached.
mocap suit -> ego video -> imu rail -> task trace

Simulation expansion
Multiply
Each captured episode becomes a family of usable examples: segmented demonstrations, retargeted motion, synthetic variations, simulation rollouts, and data products that increase coverage without discarding the original task.
demo_01 -> segment -> retarget -> sim variants
Policy formation
Train
Training should look like aligned streams becoming action: motion state, first-person context, labels, reward curves, and policy rollouts compressed into one legible surface.
qpos + ego + imu + labels -> action chunks
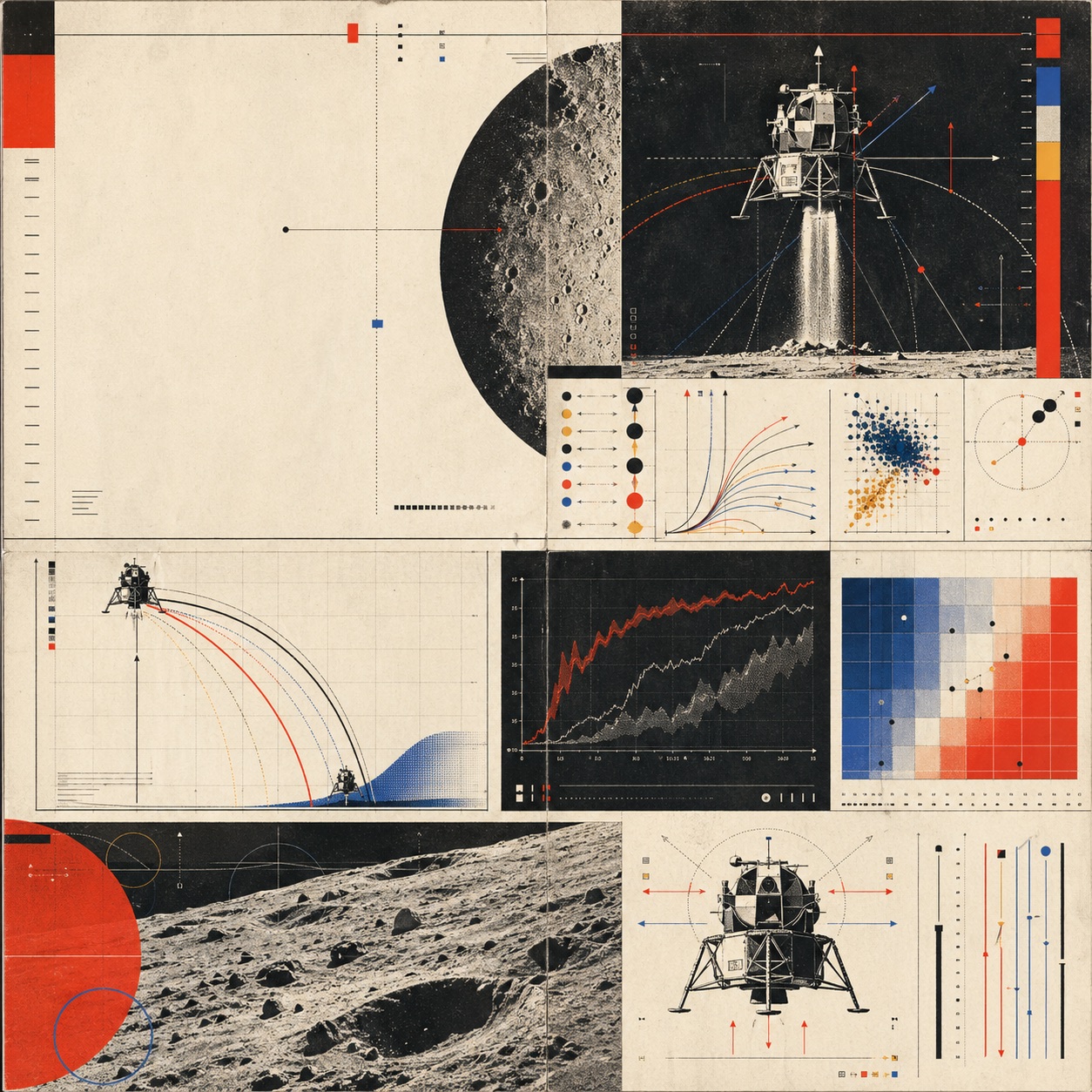
Benchmarks and transfer
Evaluate
Evaluation is the benchmark layer: policy rollout, transfer test, failure trace, and deployment feedback compared in one place so the next capture and training pass know what to fix.
benchmark -> rollout -> failure trace -> next pass
001 Capture
First signal
Capture
The loop starts with wearable capture: full-body motion, egocentric video, IMU traces, task metadata, and live sync. The goal is not a studio recording; it is a reusable demonstration with timing, intent, and physical context still attached.
mocap suit -> ego video -> imu rail -> task trace
002 Multiply
Simulation expansion
Multiply
Each captured episode becomes a family of usable examples: segmented demonstrations, retargeted motion, synthetic variations, simulation rollouts, and data products that increase coverage without discarding the original task.
demo_01 -> segment -> retarget -> sim variants
003 Train
Policy formation
Train
Training should look like aligned streams becoming action: motion state, first-person context, labels, reward curves, and policy rollouts compressed into one legible surface.
qpos + ego + imu + labels -> action chunks
004 Evaluate
Benchmarks and transfer
Evaluate
Evaluation is the benchmark layer: policy rollout, transfer test, failure trace, and deployment feedback compared in one place so the next capture and training pass know what to fix.
benchmark -> rollout -> failure trace -> next pass
-
4
Loop stages
-
12+
Modalities per capture
-
25+
Environment types
The capture system behind the loop.
The Phi9 MoCap Rig records full-body motion and first-person video together, timed and labeled by task. The output is reusable training data instead of one-off recordings, so the same demonstration can move through training, fine-tuning, and deployment.
Open the MoCap RigThe bottlenecks we are actively working through.
These are not abstract themes. They are the constraints shaping the systems, experiments, and artifacts we are building now.
- 01
Data that carries intent, not just observation.
Most pipelines record visible motion but lose the task underneath it. We are working on capture that preserves action, context, and what the body was trying to achieve.
- 02
Physical data is expensive.
You cannot scrape physical behavior. Every demonstration needs a rig, a subject, a calibration, and a clean task. The work is making each capture travel further without losing signal.
- 03
Benchmarks that predict real-world performance.
A benchmark score means little if a policy falls apart on an unscripted task. We care about evaluation that predicts transfer, failure, and what survives outside the benchmark.
- 04
One loop, not three stages.
Capture, training, and evaluation still get treated as separate departments. We are trying to wire them into one visible loop so progress does not disappear between stages.
Projects, notes, and technical progress from the lab.
Open work from the loop: systems, experiments, and technical questions published as they evolve.
Contact
Building in physical AI?
If you are working on data, research systems, or deployment infrastructure for physical intelligence, write to us.